Researchers try to outswim a tuna

What does it take to swim like an actual fish?
To find out, a multidisciplinary team of researchers, led by UVA mechanical and aerospace engineering professor Hilary Bart-Smith, designed and built a robotic fish. Behold the Tunabot.
Modeled after a yellowfin tuna, the Tunabot was designed to capture a tuna’s “biological swimming” characteristics. The researchers were interested in tuna because the fish are capable of both remarkable bursts of speed—as fast as nearly 20 body lengths a second, according to Bart-Smith—but also of swimming long distances. Understanding how a tuna does that could lead to innovative new developments in underwater propulsion, among other possible applications.
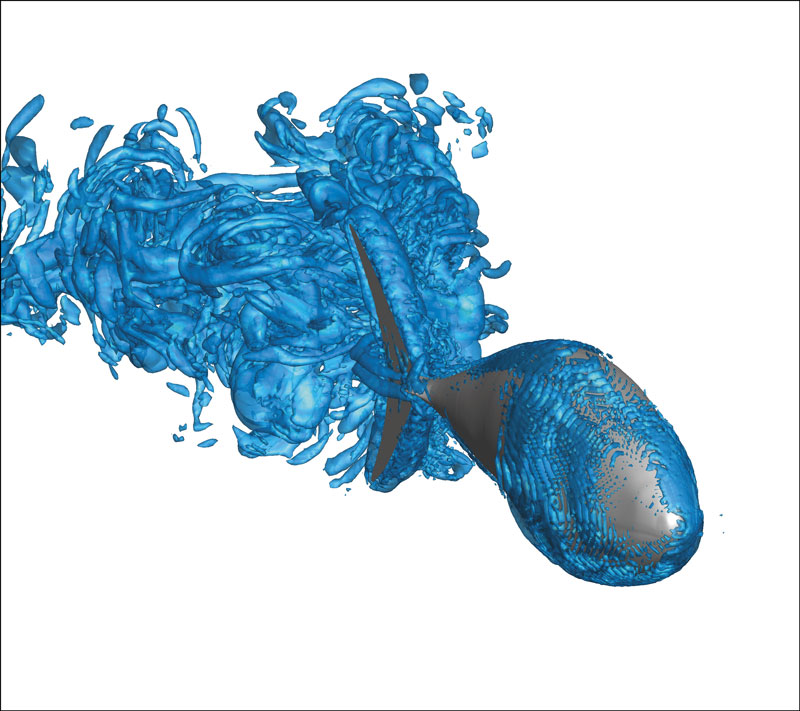
The researchers discovered that a high-frequency tail flap is key—and that how the body moves in concert with that flap is also important. “It is almost a ‘yin and yang’ type of thing,” Bart-Smith says. The Tunabot, while not yet equal in speed or efficiency to its biological counterpart, has come close enough in performance to affirm a key principle underlying the team’s approach: “In order to really understand how biology swims, you really have to design and build and test a platform that is able to achieve the characteristics of what biology is doing,” Bart-Smith says.
Learning from the current iteration, “we have a much better understanding of what we need to do in order to swim faster,” Bart-Smith says. In the works now is Tunabot 2.0, with “game-changing improvements,” she says. “Our goal is not just to achieve what biology has achieved, but to surpass it.”