Robot, take the wheel
In University lab, engineers teach autonomous vehicles to navigate an unpredictable world

The promise of autonomous vehicles is irresistible. Imagine fleets of self-driving cars seamlessly dispatching themselves from point to point; drones whisking deliveries to your door; and tractors plowing, planting and harvesting fields by themselves.
Technology and transportation companies insist that these futuristic scenarios will soon be commonplace. Yet between that hype and reality, problems remain that need to be solved before robots can be set loose to navigate our world. At the University of Virginia’s School of Engineering and Applied Science, Assistant Professor Nicola Bezzo leads a team of researchers building autonomous systems with the capacity to overcome some of those problems—and to put computers permanently in the driver’s seat.
In an autonomous vehicle, a system of sophisticated sensors, computers and activators takes the place of a human operator. And because these sensors are so much more precise than human perception, and computation speed so much faster, in many situations these systems are superior to human drivers. With more than 6 million road-vehicle accidents annually in the U.S. alone, replacing ourselves with robots has enormous potential to save lives, prevent injuries, reduce property damage and improve traffic conditions.
“Definitely the potential for safety is massive, because when they work well they work so well,” says Noah Goodall, a research scientist at the Virginia Transportation Research Council, a partnership between the Virginia Department of Transportation and UVA. Computers never fall asleep, Goodall points out. They can keep a vehicle perfectly centered in a traveling lane and maintain constantly calibrated safe following distances. They don’t panic, overreact or get distracted. “They do some things so much better,” Goodall says.
And technologically, according to Bezzo, all the pieces to make autonomous vehicles possible already exist. “We have the sensors, we have the computation power, we have the activators—all the tools are there, the techniques have been explored,” he says.
Yet what remains to be solved is putting all the pieces together to create truly autonomous vehicles capable of safely navigating the complex variables of the real world. Weather, traffic, roadway conditions, construction, varied environments, mechanical failures, distracted drivers, pedestrians, wildlife, even a malicious cyberattack—the range of what Bezzo calls “uncertainties” an autonomous vehicle might encounter is virtually infinite. It would be impossible to predict every scenario.
Thus, the big challenge to be overcome is to create systems “able to reason about information that you have available,” Bezzo says. If a tire blows, a child runs into the road, or a sudden summer storm unleashes high winds and a downpour, then “The vehicle should be able to recognize, learn and be able to deal with that automatically,” Bezzo says.
We create models of the robots and of the world and include uncertainties. Then we develop theoretical frameworks to handle such situations.
—Nicola Bezzo
Building from mathematical theory through complex computer modeling to hardware testing with advanced aerial and ground vehicles in their lab, Bezzo and his team are developing systems with the adaptive ability to assess and respond in this way.
“My research,” Bezzo says, “is about how I can improve a system to make it more autonomous, more efficient, more reliable, more robust—but also more resilient against uncertainties, against malicious attack and all of that—and to have it perform online and on time.”
To accomplish that ambitious goal, he says, “We create models of the robots and of the world and include uncertainties and disturbances. Then we develop theoretical frameworks to control the vehicle to handle such situations.” The next step is testing in simulators before finally moving on to the vehicles themselves.
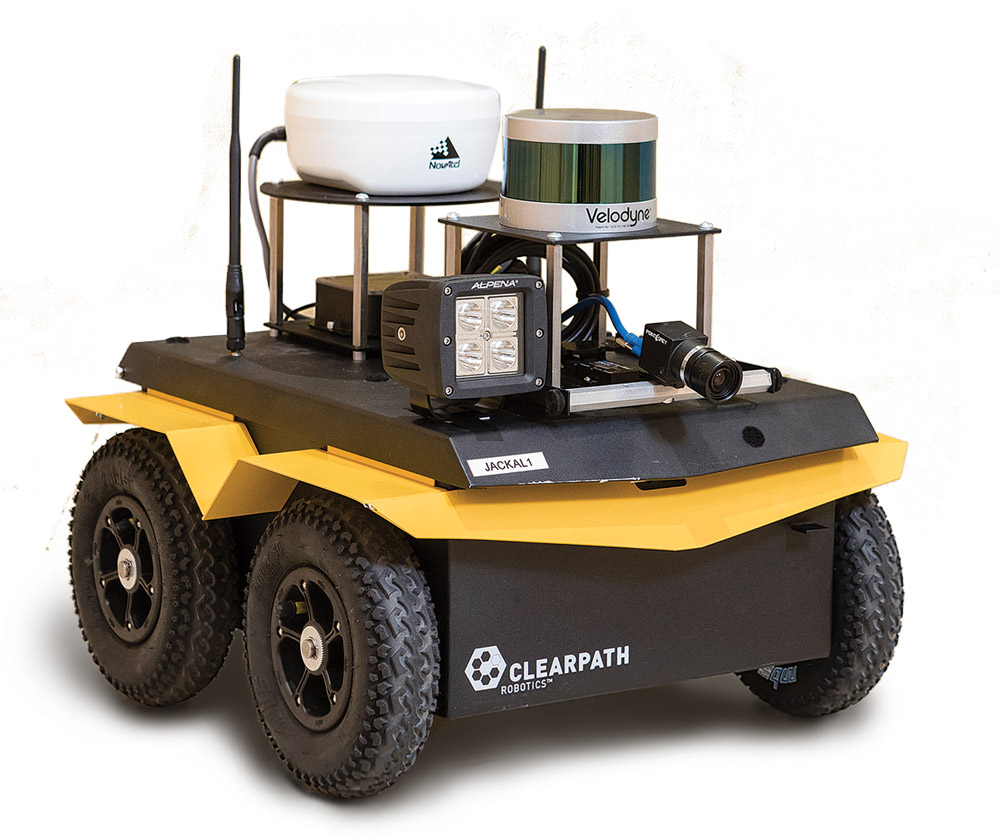
One essential question is how a system can recognize that it is even encountering a problem. A traffic jam is one thing, but what happens if the system malfunctions or, more concerning, a cyberattacker seeks to wreak havoc with a fleet of hijacked vehicles? Recent experiments in the team’s lab have revealed vulnerabilities to both cyber and physical attack on LiDAR (light detection and ranging) laser sensors that map surroundings in three dimensions, which are a key technology in many autonomous vehicle designs.
To address that issue, Bezzo and his team are developing prediction and comparison capabilities in autonomous systems, first ensuring that a vehicle would be self-aware enough to distinguish between normal operation and any divergence from that state so it could then “find the best option to perform and be safe,” Bezzo says.
Another challenge for autonomous systems is recognizing and reasoning about objects. Goodall explains that, while human drivers can easily and rapidly identify and distinguish between an enormous range of animate and inanimate objects, “It is hard for the computer to tell what’s a person and what’s a tree, what’s a person and what’s a traffic cone.”
An autonomous vehicle, though, will need to make decisions about navigating among many such objects. In Bezzo’s lab recently, members of his team demonstrated how a drone, moving around the lab’s flying space, was able to continuously re-evaluate its path as it encountered unpredictable obstacles. In addition, Bezzo says, his team has been experimenting with multiple drones in close proximity, observing how they interfere with one another and other objects, and finding solutions to counteract those disturbances.
Bezzo’s work also considers other innovative applications for autonomous vehicles, particularly in situations difficult or dangerous for humans. The team has configured a land-based vehicle and aerial drone to work autonomously in sync with each other, an application with potential to improve the safety and efficacy of military or search-and-rescue operations.
Bezzo predicts that the transition to autonomous vehicles won’t be abrupt. Rather, it will be a smooth process of introducing an expanding and improving array of autonomous features, as research like his yields progressively better solutions.
“We are going to see autonomous cars very soon,” Bezzo says confidently. “All my research is to enable these vehicles to work one day in the real world.”